When you purchase through links on our site , we may earn an affiliate commission . Here ’s how it works .
Researchers inChinaand Hong Kong have develop a newartificial intelligence(AI ) watch fabric that teaches humanoid robot to stand up from an idle position fantastically quickly regardless of office or terrain .
While the research has yet to be submitted for peer recapitulation , the squad released their findings Feb. 12 onGitHub , including a paper uploaded to thearXivpreprint database , alongside a video exhibit their framework in action .

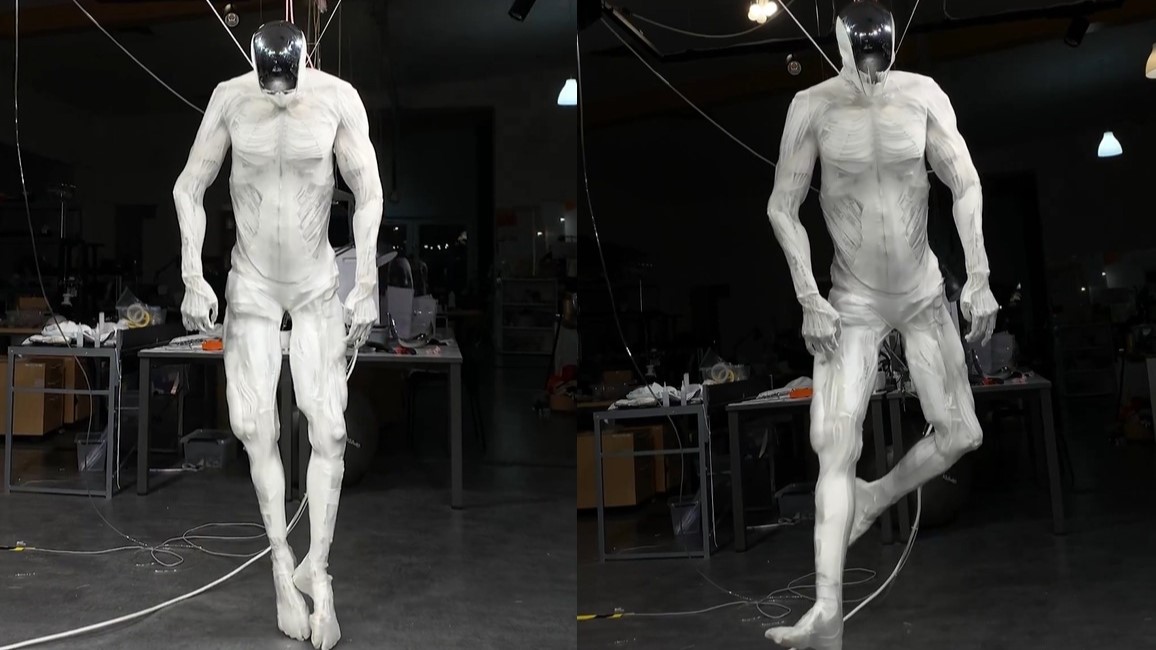
The TV shows a bipedal humanoid climb to stand after lie on its back , sitting against a wall , lie on a sofa and recline in a electric chair . The researchers also test the humanoid robot ’s ability to compensate itself on motley terrains and inclines — including a Harlan Fisk Stone route , a drinking glass slope and while leaning against a tree .
They even undertake to break up the robot by hit or kicking it while it was seek to get up . In every scenario , the robot can be seen set to its surroundings and is shown successfully standing up .
Related:17 weird , wonderful and terrifying automaton we saw at CES 2025 — from a anthropomorphous android companion to a automatonlike mixologist

This singular power to get rap down and then get up again is thanks to the system call in " Humanoid Standing - up Control " ( HoST ) . The scientists achieved this withreinforcement learning , a character of automobile hear where the agent ( in this case the HoST framework ) set about to do a task by trial run and error . In essence , the robot take on an action , and if that natural action results in a irrefutable outcome , it is send off a reward signal that encourages it to take that action again the next time it finds itself in a similar state .
Rising to the occasion
The team ’s scheme was a little more complicated than that , using four separate reward groups for more targeted feedback , along with a series of movement constraints including movement smoothing and speed bound to prevent planetary or violent motility . A vertical pull force was also utilize during initial breeding to help oneself direct the early stages of the learning process .
The HoST model was originally train in simulations using theIsaac Gym simulator , a physics simulation environment developed by Nvidia . Once the model had been sufficiently check on simulations , it was deployed into aUnitree G1 Humanoid Robotfor data-based testing , the results of which are establish in the TV .
— Watch biped robots running in a more human - like room than ever thanks to major vision upgrade
— Watch robot wiener and drone locked in tearing battle — blasting fireworks at each other in future war demonstration
— 12 polar moment in the account of robotics , from Isaac Asimov to self - driving cars
" Experimental upshot with the Unitree G1 android robot demonstrate smooth , unchanging , and rich standing - up motions in a multifariousness of literal - world scenarios , " the scientists wrote in the study . " look ahead , this workplace paves the way for integrate standing - up control into live humanoid systems , with the potential of expand their substantial - world applicability . "
catch up might seem second nature to we humans , but it ’s something that humanoid automaton have struggled to replicate in the past times , as you’re able to glean from amontage of robots falling overand being ineffective to return to an unsloped position . Teaching a robot towalk or course like a human beingis one thing , but to be utilitarian in the veridical earthly concern , they need to be able to handle challenging situations like stumbling , touch off and fall over .
You must confirm your public display name before commenting
Please logout and then login again , you will then be prompted to enter your display name .