When you purchase through links on our site , we may make an affiliate commission . Here ’s how it work .
Humanoid robots could soon move in a far more realistic style — and even trip the light fantastic toe just like us — thanks to a new software fabric for dog human movement .
Developed by researchers at UC San Diego , UC Berkeley , MIT , and Nvidia , " ExBody2 " is a new engineering that enable humanoid robots to perform realistic movement base on detailed scans and motion - tracked visual image of humans .

The researcher desire that futurity humanoid golem could do a much wider mountain range of tasks by mime human movements more accurately . For instance , the teaching method could avail automaton operate in character ask fine movements — such as retrieving item from shelves — or moving with charge around humans or other machine .
ExBody2 put to work by take on imitation movements based on movement - capture scans of humans and translating them into usable motility data for the robot to copy . The framework can replicate complex movements using the automaton , which would lease golem move less stiffly and accommodate to different tasks without needing encompassing retraining .
Related:8 of the weirdest robot in the world right now
This is all taught using support encyclopedism , a subset of machine learning in which the golem is fertilise declamatory amounts of data to ensure it takes the optimal route in any given situation . skillful yield , simulated by researchers , are assigned positive or electronegative lots to " honour " the model for worthy consequence , which here mean replicating motions precisely without compromise the bot ’s stability .
The framework can also take short movement clips , such as a few seconds of dance , and synthesise new frames of movement for reference , to enable robots to nail longer - duration social movement .
Dancing with robots
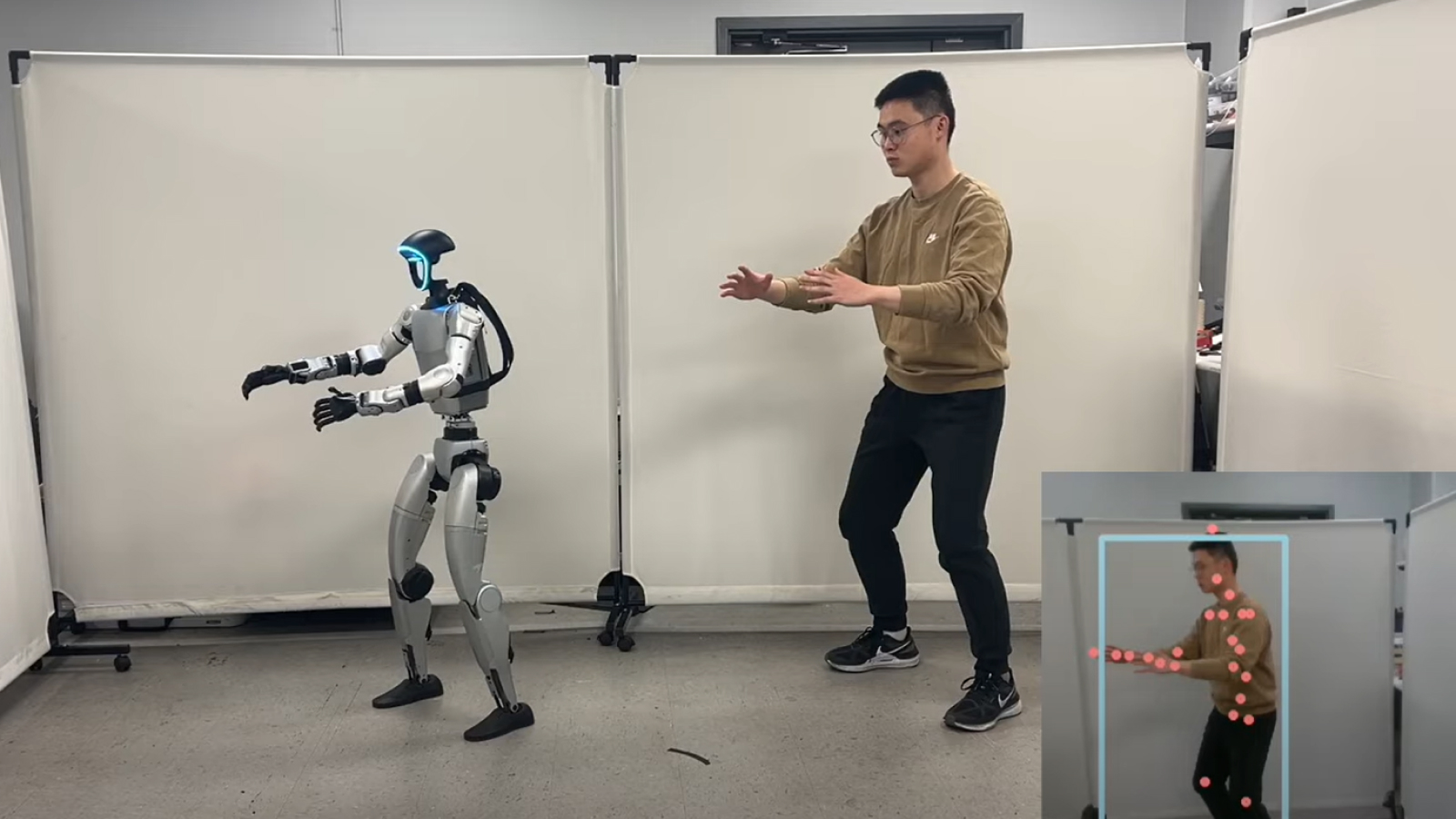
In avideo posted to YouTube , a robot trained through ExBody2 dance , spars and exercises alongside a human matter . Additionally , the robot mime a researcher ’s movement in real time , using extra codification title " HybrIK : Hybrid Analytical - Neural Inverse Kinematics for Body Mesh Recovery " developed by the Machine Vision and Intelligence Group at Shanghai Jiao Tong University .
At present , ExBody2 ’s dataset is for the most part focused on upper - soundbox movements . In a discipline , upload Dec. 17 , 2024 to the preprint serverArXiv , the researchers behind the framework explicate that this is due to concerns that introducing too much motility in the low one-half of the robot will cause unbalance .
" Overly simplistic tasks could set the preparation policy ’s ability to generalize to new situations , while overly complex tasks might outstrip the golem ’s operational capabilities , guide to uneffective learning outcome , " they wrote . " Part of our dataset readiness , therefore , includes the ejection or limiting of entries that featured complex low-down body movements beyond the robot ’s capability . "

— 17 weird , wonderful and terrifying robot we saw at CES 2025 — from a humanlike android companion to a robotic mixologist
— Self - healing ' live skin ' can make robots more humanlike — and it attend just as creepy-crawly as you ’d look
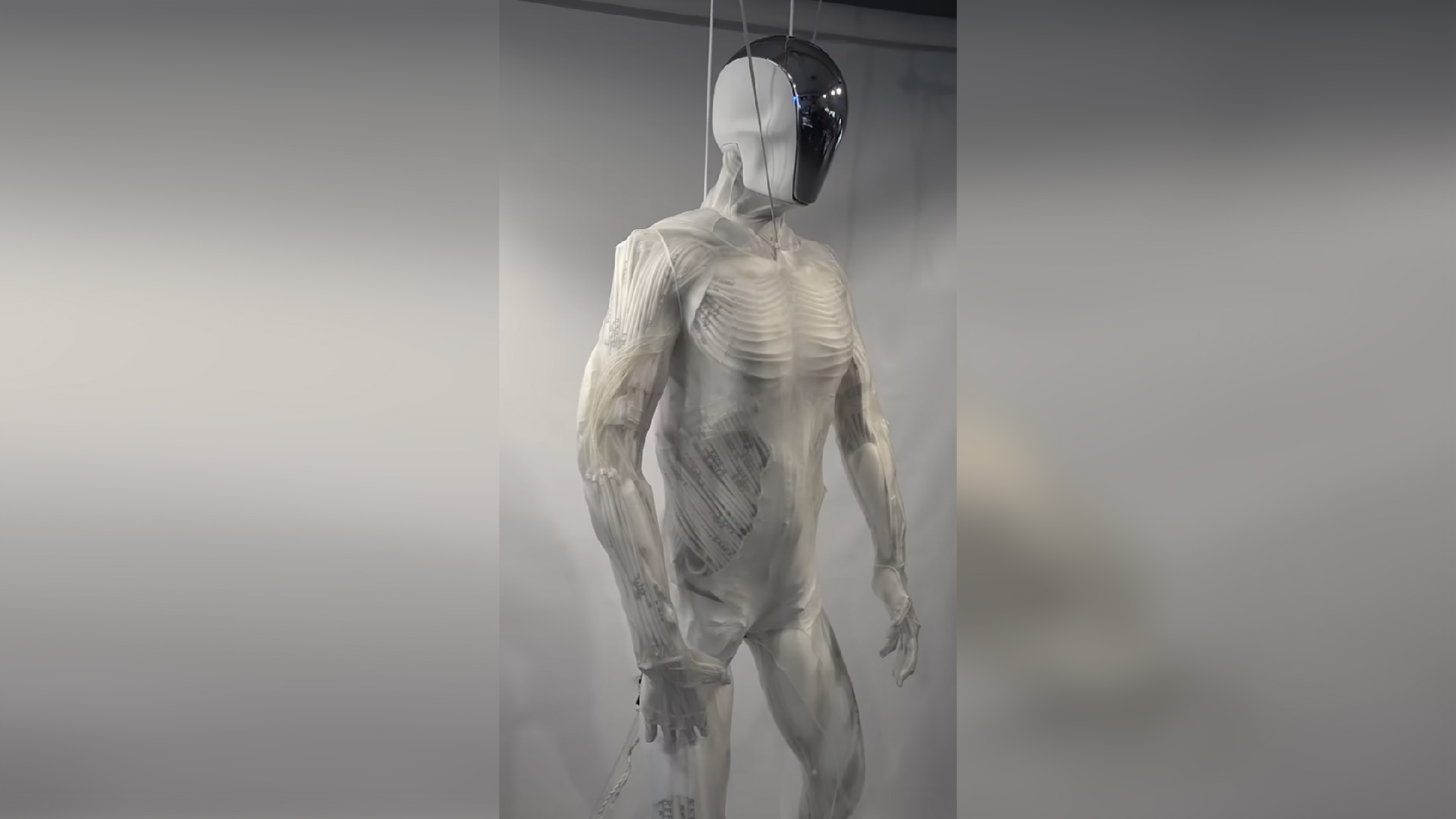
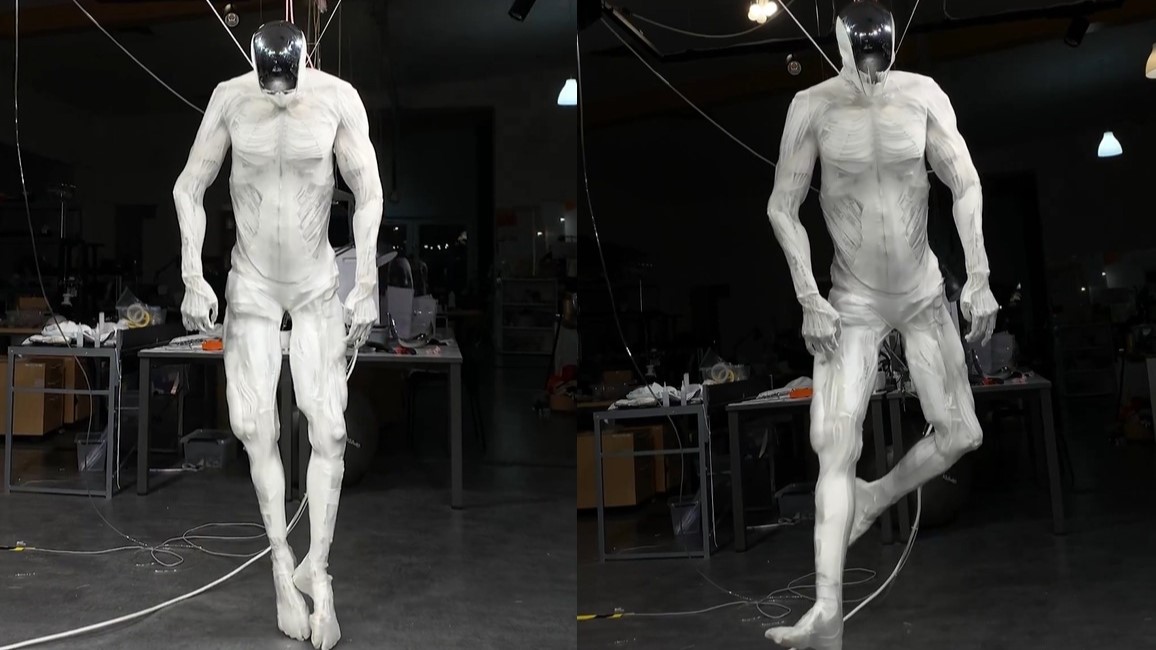
— Watch this terrific automatonlike torso natural spring into lifetime

The researchers ' dataset contains more than 2,800 apparent motion , with 1,919 of these coming from the Archive of Motion Capture As Surface Shapes ( AMASS ) dataset . This is a large dataset of human motions , including more than 11,000 case-by-case human movements and 40 hours of detailed motion data point , intended for non - commercial-grade rich learning — when a neural web is trained on huge amounts of data to discover or regurgitate patterns .
Having proven ExBody2 ’s effectiveness at reduplicate human - like movement in humanoid golem , the squad will now turn to the problem of reach these solution without deliver to manually curate datasets to ensure only suitable information is uncommitted to the framework . The researcher suggest that , in the future , automatise dataset collection will serve smooth this physical process .
You must confirm your public display name before commenting
Please logout and then login again , you will then be prompted to enrol your display name .