When you purchase through links on our site , we may pull in an affiliate military commission . Here ’s how it works .
" A dog is a man ’s in force friend , " the old saying goes . Can the same shortly be say of robot andiron ?
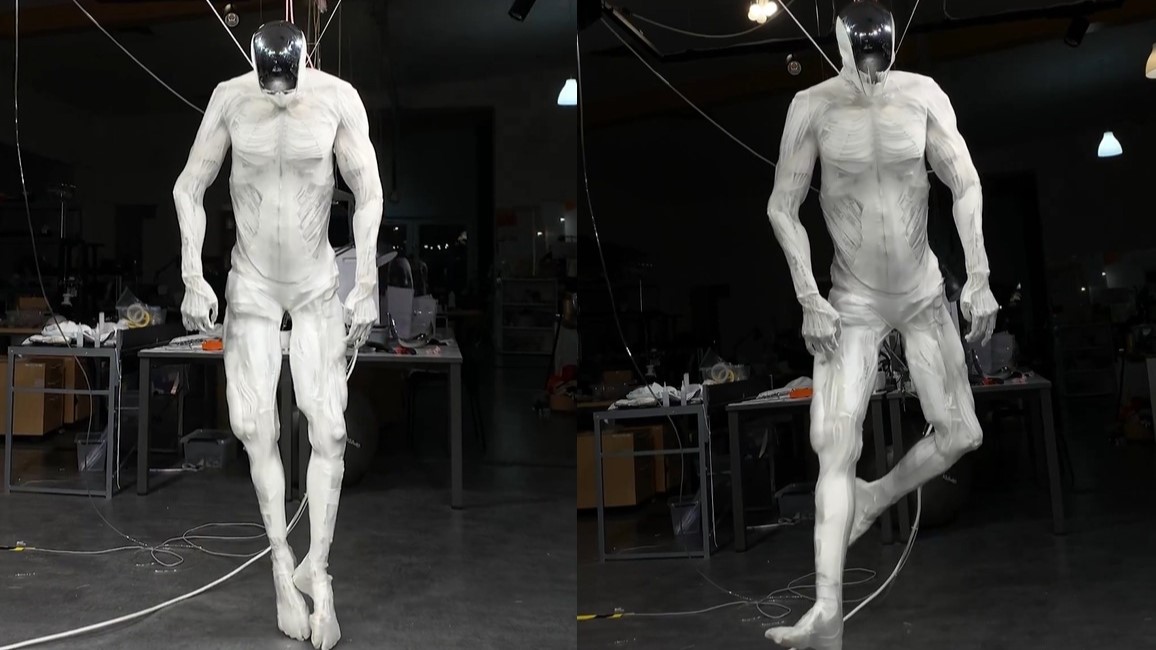
This summer , a radical of scientist will trip to Oregon ’s snow - capped Mt. Hood to train a dog - shaped robot named Spirit how to walk . The slopes of Mt. Hood are strew with volcanic rocks and sprinkled with glaciers , a tough environment that researchers think resemblesthe moon — which Spirit is being prepare to finally explore .

A prototype of the four-legged robot Spirit training in the mountains
" What we recognize , jolly early on , is that a legged robot has the power to interact with soil in ways that wheel cannot,“Douglas Jerolmack , a prof of Earth and planetary sciences at the University of Pennsylvania and the principal detective of the labor , say in astatement . " This interaction is n’t just about mobility ; it ’s about questioning and understanding the surroundings it impress through , in real time . "
The $ 3 million Spirit , whose growth is being fund byNASA , swear on its camera head and four metallic element legs , which " feel " the scratchy terrain below , like a human testing the sturdiness of a frozen river with a few foot rap . reckon on the stability of the ground , Spirit should then set its speed and commission accordingly .
have-to doe with : Humanity ’s time to come on the moon : Why Russia , India and other body politic are racing to the lunar south pole

Last summertime , a test of how well Spirit sensed its surround on Mt. Hood revealed the robot could move across and over slushy snow as well as sprint on slack soil and boulders — though the automaton occasionally stumbled and fall .
" We learn and ameliorate from the observed failures,“Feifei Qian , an assistant prof of electrical and computer technology at the University of Southern California ( USC ) and the lead research worker of the task , said in a USCstatement .
Fetch, rover
So far , the moon has been explored in - situ by four - wheel around rovers , set off with Russia ’s Lunokhod 1 that arrive on the lunar surface in 1969 and cross about 6 miles ( 10 kilometers ) in 10 month . Two class subsequently , astronauts with the Apollo mission used a dune buggy - like fomite to motor more than 22 Roman mile ( 35 kilometre ) on the moon . The most late wheeled robot was the Pragyan roamer , part ofIndia ’s Chandrayaan-3 mission , which traversed 331 base ( 101 cadence ) and had to sail around a volcanic crater during the two - week missionary work .
While wanderer are emphatically utile for ferry astronauts and hauling equipment , they can not drive on outrageous slope and their wheel could get stuck when search new billet , such as the lunar south pole wherepatches of iceremain as a frigid layer on unaffixed soil . The risks limit scouter to already well - explored places , whereas legged robots can sprint up slope , over boulders and are more mobile to research unfamiliar regions , the investigator say .
The lunar month may someday even become a collaborative workplace for teams of legged and wheeled robots that exercise together to quash peril . Earlier this year , NASA fund $ 2 million to researchers at USC and the University of Pennsylvania to create algorithms that will permit multiple robots to link up together , exchange local ground conditions and collaboratively represent out a safe track onward .

For example , if a golem got stick , other robots nearby would be capable to impound to one another to form a bridge deck and hoist the trapped robot to safety , according to the verbal description of the project , which is foretell TRUSSES ( inadequate for Temporarily , Robots Unite to Surmount Sandy Entrapments , then Separate ) .
" Very little of the moon ’s surface has actually been explored,“Cynthia Sung , a professor of mechanically skillful engine room at the University of Pennsylvania who leads TRUSSES , said in the statement . " So it defecate sensory faculty to have robot teams that can both sense and adapt to unexplored terrain . "
Next year , the research worker plan to fine - tune Spirit in the dune fields at White Sands , New Mexico . There is no confirmed date for when Spirit might typeset its four feet on lunar grunge .